stm32标准库开发(三):TIM定时中断
参考江科大的讲解,记录了TIM通用定时器的常用功能,包括定时器中断,以及后面文章的输入捕获测量频率、输出比较实现PWM波、编码器测速等。
TIM定时器
TIM(Timer)是单片机最常用的片内外设之一,能够完成很多复杂任务,stm32系列的定时器资源分为高级定时器、通用定时器、基本定时器,最常用的是通用寄存器,高级定时器会在三相电机驱动用得较多:
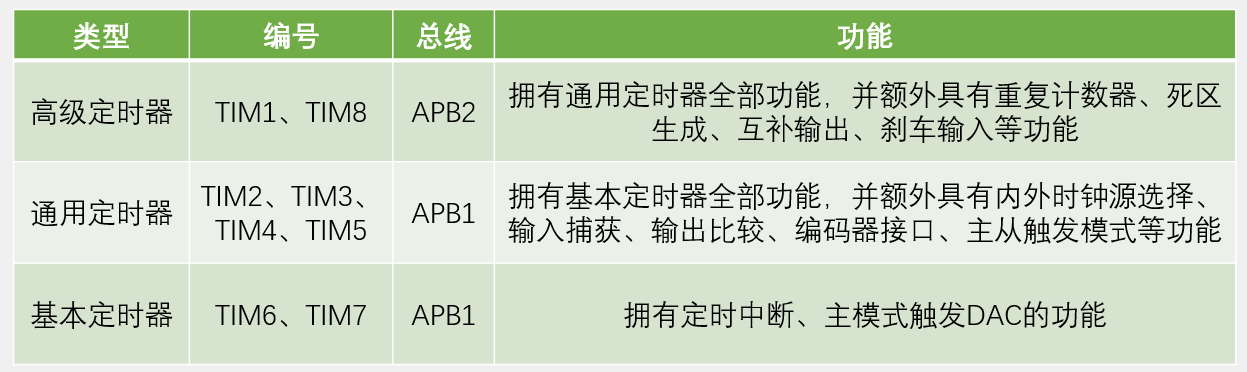 其中STM32F103C8T6定时器资源包含TIM1、TIM2、TIM3、TIM4,即一个高级定时器+三个通用定时器。
其中STM32F103C8T6定时器资源包含TIM1、TIM2、TIM3、TIM4,即一个高级定时器+三个通用定时器。
基本定时器
基本定时器的任务主要是产生定时中断、主模式触发DAC:
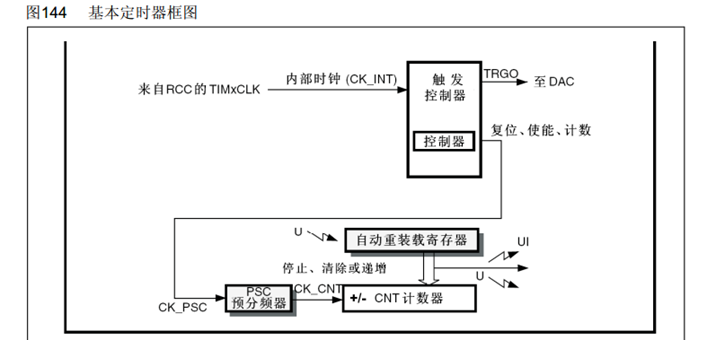 基本定时器结构包含RCC内部时钟(c8t6主频72M),触发控制器(只能选择内部时钟、主模式DAC),以及时基单元。
基本定时器结构包含RCC内部时钟(c8t6主频72M),触发控制器(只能选择内部时钟、主模式DAC),以及时基单元。
时基单元包括预分频器PSC、自动重载寄存器、CNT计数器,PSC是一个16位寄存器,对内部72M时钟进行分频,最大65536分频。自动重载寄存器存储了计数的目标值,计数器从0开始向上向重载值计数,一旦达到重载值,就会产生定时器中断并且清零计数值重新计数,产生的中断既可以通向NVIC触发CPU中断处理,也可以作为事件中断连接其他片内外设。
基本定时器只支持向上计数,在通用、高级定时器中还支持向下计数、中央对齐模式,向下计数时计数器每次从重载值开始递减,直到计数器减为0触发中断,并且重新载入重载值计数;中央对齐模式计数器从0开始计数至重载值触发中断(不会清零),再计数递减至0触发定时器中断。定时器中断是针对内核的术语,实际上产生的是一种更新中断,在计数值==重载寄存器/计数值==0时,下一个时钟到来就会发生计数溢出,产生更新中断,也是定时器中断。
主模式DAC允许定时器中断(事件中断)直接驱动DAC模块输出波形,减轻了反复中断CPU的开销,主要原理是将定时中断通过TRGO(Trigger Out,触发输出)接到DAC触发引脚。(注:c8t6无DAC外设)
通用定时器
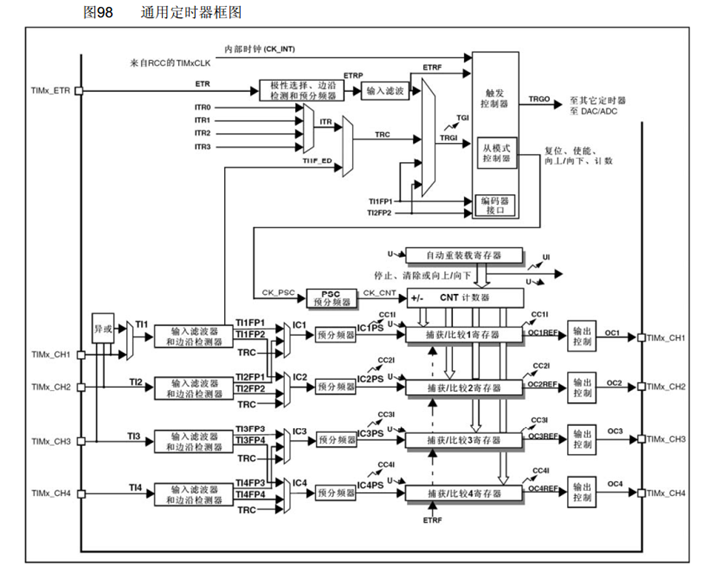
除了扩展了计数方式之外,通用定时器实现了更加复杂的定时器中断和事件中断功能,还扩展了其他功能包括输入捕获、输出比较、编码器测速等。
 本文集中讨论的是定时器中断:
本文集中讨论的是定时器中断:
可以选择外部时钟:包括外部引脚时钟、片内其他定时器的时钟:
外部引脚时钟可以经过滤波电路,由触发控制器进行选择作为定时器中断的时钟信号,可以完成一些电平计数任务(红外计数、光敏等);
此外可以和片内其他定时器级联的时钟:假设采用内部72MHz作为计数时钟,那么最长的计数间隔为:
计数时间
计数器同样是一个16位寄存器,最大计数值为65535,即
即单级定时器最大计数时间不超过一分钟。
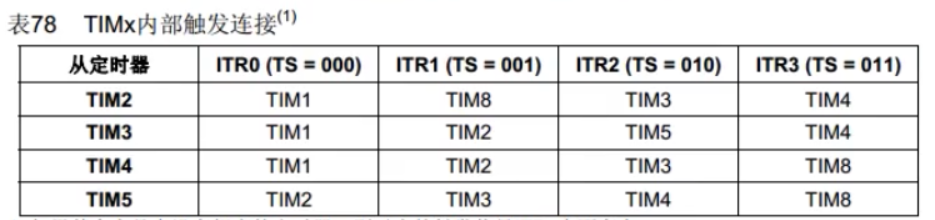
因此,如果采用级联的方式,那么两个定时器的计数时间为59.65s×65535(分频)×65535(计数)约八千多年,三个级联就能长达三十几万亿年,远超出宇宙寿命,stm32定义了定时器级联连接:
- 最后是TIMx_CHx引脚捕获的时钟信号,信号的双边沿都能够作为计数的时钟。
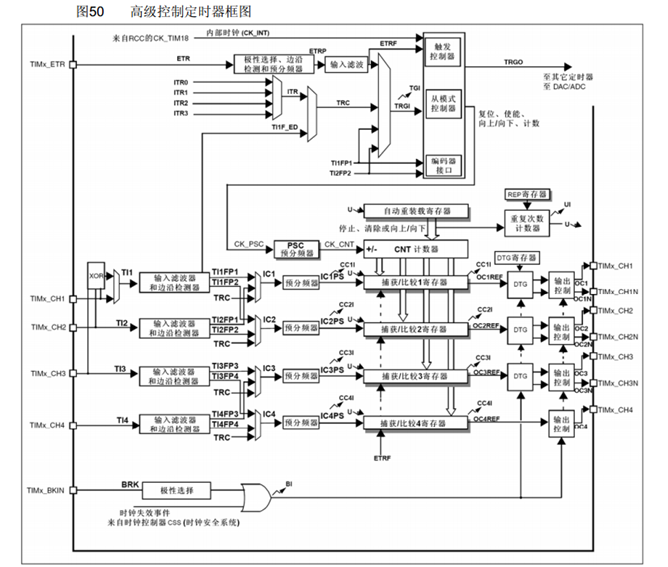
高级定时器
计数单元增加了16位的重复计数寄存器,允许重复计数多次满(65535)后再触发中断,因此单个计数器的计数时间59.65s×65535约45天;其余输出相反相位PWM波、死区寄存器、刹车输出主要用于三相无刷电机的驱动(没用过,鸽。
分频细节
PSC分频本身也是一个16位计数器,当选择2分频时,实际上PSC寄存器的重载值是1,说明上层时钟上升沿到来(假设为内部时钟,记为CK_PSC),PSC寄存器反复在0和1之间计数,导致二分频。因此实际上的分频数满足:
因此设置分频值时PSC应该设置为1而不是2 PSC分频值的更新是更新信号发生后有效,每次时基单元计数完毕才会发出更新事件信号。
影子寄存器(了解)
在图中自带阴影的寄存器,被称为影子寄存器(shadow register);影子寄存器是时序变化的背后推手,在分频时要对预分频控制寄存器赋值,在重载计数预装值时要对自动重载预装载寄存器赋值,但是实际上还存在另外一种寄存器,分别是预分频缓冲区(预分频影子寄存器)、自动重载影子寄存器,它们会在更新事件信号到来时将前面的寄存器值送到影子寄存器,新的分频值、重载值才真正生效,这种机制避免了计数机制的一些错误,例如当当前计数超过新预装值时,较小的新预装值影响原来的计数时序,否则计数必须计到16位溢出才能判断异常。
通用定时器中断配置
 通用定时器中断配置包含几个方面:
通用定时器中断配置包含几个方面:
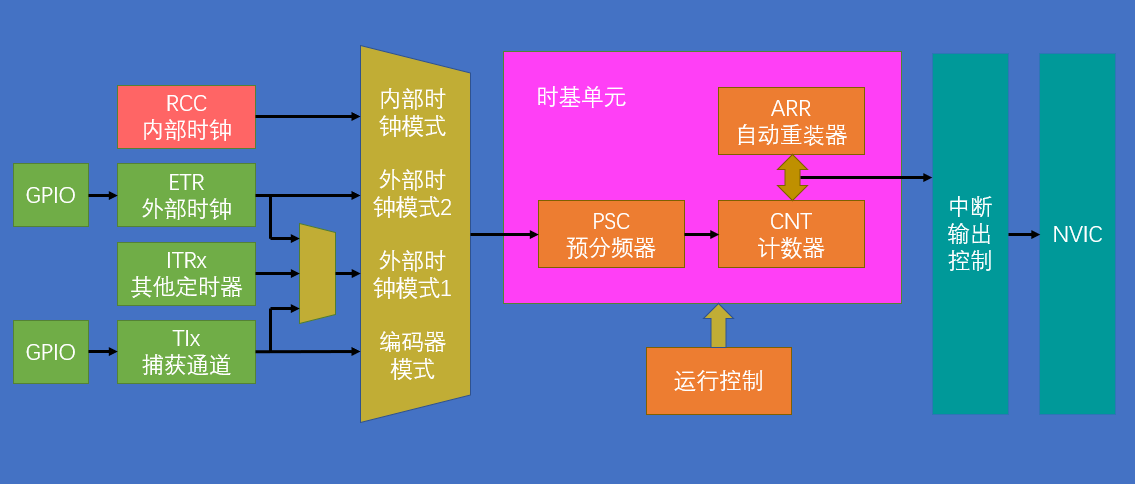
1. 选择时钟源
时钟源总共有四种:内部时钟、外部引脚时钟、TIM引脚通道以及其他定时器时钟,其中外部模式1和外部模式2结合通用寄存器结构图看,外部模式2特指外部引脚不经过TRGI触发直接使滤波信号ETRF作为时钟信号,一般用于完全依赖外界电平条件的计数,外部模式1则比较广泛,TIM捕获的边沿、外部引脚信号、编码器接口、其他定时器时钟都经过TRGI。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16//默认不写也可:内部时钟
void TIM_InternalClockConfig(TIM_TypeDef* TIMx);
//ITRx代表来自其他定时器时钟
void TIM_ITRxExternalClockConfig(TIM_TypeDef* TIMx, uint16_t TIM_InputTriggerSource);
//TIMx捕获时钟
void TIM_TIxExternalClockConfig(TIM_TypeDef* TIMx, uint16_t TIM_TIxExternalCLKSource,
uint16_t TIM_ICPolarity, uint16_t ICFilter);
//外部模式1
void TIM_ETRClockMode1Config(TIM_TypeDef* TIMx, uint16_t TIM_ExtTRGPrescaler,
uint16_t TIM_ExtTRGPolarity,uint16_t ExtTRGFilter);
//外部模式2
void TIM_ETRClockMode2Config(TIM_TypeDef* TIMx, uint16_t TIM_ExtTRGPrescaler,
uint16_t TIM_ExtTRGPolarity, uint16_t ExtTRGFilter);
2. 时基电路配置
和GPIO、EXTI中断配置一样,TIM的时基电路采用结构体配置,其中TIM_ClockDivision是滤波电路的分频,可以额外再选择1、2、4分频;
1
2
3
4
5
6
7void TIM_TimeBaseInit(TIM_TypeDef* TIMx, TIM_TimeBaseInitTypeDef* TIM_TimeBaseInitStruct);
- TIM_TimeBaseInitStruct:
-- TIM_ClockDivision=TIM_CKD_DIV1; //1分频
TIM_CounterMode; //向上、向下、中央对齐
TIM_RepetitionCounter=0; //仅高级定时器:16位重复计数寄存器
TIM_Prescaler=7200-1; //16位预分频值PSC
TIM_Period=10000-1; //16位计算值ARR
3. 开启定时器中断
开启TIMx定时器,并且指定中断源TIM_IT;中断源来源根据场景不同选择,例如内部定时可以直接选择更新事件(UEV)中断,输出PWM波应该选择TIMx捕获中断、多相PWM输出应该选择相变中断等,结合实例看。
1
void TIM_ITConfig(TIM_TypeDef* TIMx, uint16_t TIM_IT, FunctionalState NewState);
4. 配置NVIC
中断CPU的都应该配置NVIC分组+初始化: 1
2
3
4
5
6
7
8NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //抢占优先级与响应优先级分组
NVIC_InitTypeDef NVIC_InitStruct; //NVIC初始化,NVIC管理中断分配
NVIC_InitStruct.NVIC_IRQChannel=TIMx_IRQn; //1打开TIMx的中断,参考stm32f10x.h以及对应密度宏定义
NVIC_InitStruct.NVIC_IRQChannelCmd=ENABLE; //2 NVIC使能
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority=1; //3 设置先占优先级
NVIC_InitStruct.NVIC_IRQChannelSubPriority=1; //4 设置响应优先级
NVIC_Init(&NVIC_InitStruct);
5. 使能定时器
1 | TIM_Cmd(TIMx, ENABLE); //计数器使能 |
内部时钟+OLED时序每隔1s输出
采用内部72M时钟,定时1s,每隔1s OLED计数+1; 1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44void Timer_InternalInit(void) //内部时钟
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE); //配置RCC时钟,TIM2挂载在APB1总线
TIM_InternalClockConfig(TIM2); //采用内部时钟
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct; //时基电路初始化
TIM_TimeBaseInitStruct.TIM_ClockDivision=TIM_CKD_DIV1; //1 选择分频
TIM_TimeBaseInitStruct.TIM_CounterMode=TIM_CounterMode_Up; //2 选择计数方式(向上、向下、交替)
TIM_TimeBaseInitStruct.TIM_RepetitionCounter=0; //3 分频输出
TIM_TimeBaseInitStruct.TIM_Prescaler=7200-1; //4 预分频 stm32内部时钟72MHz,预分频7200-1代表每10k记一次
TIM_TimeBaseInitStruct.TIM_Period=10000-1; //5 计数 计10000个数,即10kHz计10000个数,时间为1s,1秒触发一次中断
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStruct);
TIM_ClearFlag(TIM2,TIM_FLAG_Update); //清除TIM_TimeBaseInit的更新标志,防止上电时就产生一次更新中断。
TIM_ITConfig(TIM2,TIM_IT_Update,ENABLE); //更新响应 更新响应的中断是与cpu,事件响应是向其他外设
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //抢占优先级与响应优先级分组
NVIC_InitTypeDef NVIC_InitStruct; //NVIC初始化,NVIC管理中断分配
NVIC_InitStruct.NVIC_IRQChannel=TIM2_IRQn; //1打开TIM2的中断
NVIC_InitStruct.NVIC_IRQChannelCmd=ENABLE; //2 NVIC使能
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority=1; //3 设置先占优先级
NVIC_InitStruct.NVIC_IRQChannelSubPriority=1; //4 设置响应优先级
NVIC_Init(&NVIC_InitStruct);
TIM_Cmd(TIM2, ENABLE); //计数器使能
}
//定时器处理中断
int16_t Num=0;
void TIM2_IRQHandler(void){
if(TIM_GetITStatus(TIM2,TIM_IT_Update)==SET)
Num++;
TIM_ClearITPendingBit(TIM2,TIM_IT_Update);
}
//main.c
Timer_InternalInit();
OLED_Init();
OLED_ShowString(1,1,"Hello Mo");
extern int16_t Num;
while(1){
OLED_ShowNum(4,1,Num,4);
}
外部引脚红外计数
这个功能在EXTI也实现过,EXTI中断实现计数的原理是对外部信号的计数,TIM中断实现计数的原理是把外设看成是时钟的计数,二者几乎是等效的。如果是一些突发事件,例如按键按下等,选择EXTI,如果是一些周期性的计数事件,例如生产线的计件,选TIM。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62void Timer_ExternalInit(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE); //定时器
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); //GPIO
GPIO_InitTypeDef GPIO_InitStructure; //GPIO初始化
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_0;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
//外部模式2,不分频、极性不反转(上升沿计数)、采用频率分频0(默认频率采样)
TIM_ETRClockMode2Config(TIM2,TIM_ExtTRGPSC_OFF,TIM_ExtTRGPolarity_NonInverted,0X00);
//时基电路
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;
TIM_TimeBaseInitStruct.TIM_ClockDivision=TIM_CKD_DIV1; //1分频 = 不分频
TIM_TimeBaseInitStruct.TIM_CounterMode=TIM_CounterMode_Up; //向上计数
TIM_TimeBaseInitStruct.TIM_Period=100-1; //100个数才会产生更新事件
TIM_TimeBaseInitStruct.TIM_Prescaler=2-1; //1Hz,符合遮挡手速
TIM_TimeBaseInitStruct.TIM_RepetitionCounter=0;
TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStruct);
TIM_ClearFlag(TIM2,TIM_FLAG_Update); //清除TIM_TimeBaseInit的更新标志,防止上电时就产生一次更新中断
TIM_ITConfig(TIM2,TIM_IT_Update,ENABLE); //开启定时器中断:中断源为计数的更新事件,即满100个数
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //NVIC配置
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel=TIM2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority=1;
NVIC_Init(&NVIC_InitStructure);
TIM_Cmd(TIM2, ENABLE); //开启定时器
}
//打印目前计数值
uint16_t Counter(void)
{
return TIM_GetCounter(TIM2);
}
//每满100,Num才会+1,进位计数
int16_t Num=0;
void TIM2_IRQHandler(void){
if(TIM_GetITStatus(TIM2,TIM_IT_Update)==SET)
Num++;
TIM_ClearITPendingBit(TIM2,TIM_IT_Update);
}
//main.c
Timer_ExternalInit();
extern int16_t Num;
OLED_Init();
OLED_ShowString(1,1,"NUM:");
OLED_ShowString(2,1,"Count:");
while(1)
{
OLED_ShowNum(2,7,Num,5);
OLED_ShowNum(3,7,Counter(),5);
}