OpenCV C++记录(十三):角点检测算法与亚像素优化
角点是图像的重要特征,往往比边缘和平坦区域具有更独一无二的特征,例如在拼图时,我们往往会先寻找物体对象的角点,最后再完善边缘和平坦区域,对于图像的特征检测亦是如此,角点检测是重要一环。
Harris角点检测
基本原理
1988年,Chris Harris和Mike
Stephens提出了角点检测的方法,称为Harris角点检测,其基本思想是考虑窗口到各个方向的灰度差异总和,表示为:
权值函数既可以是普通窗口,也可以是与中心距离相关的高斯窗口。
其中增量项可以根据二元一阶泰勒展开成偏导项Ix和Iy和二阶无穷小:
故原式等于:
此处令M =
此处的特征值可以理解成两个正交方向的变化率,结论如下:
当|R|很大,为角点,因为此时λ1和λ2均很大,说明两个正交方向都有大的变化率;
当|R|很小,为平坦区,此时λ1和λ2都很小,两个正交方向变化率军均很小;
当R<0, 为边缘,说明λ1和λ2其中一个很小,只有一个方向存在变化率,为边缘;
此处所谓R大还是小的界限由用户确定。
OpenCV实现
OpenCV提供了cv::cornerHarris函数来进行Harris角点检测,主要作用是计算R响应,对于Ix和Iy方向导数,使用了Sobel算子进行计算,对于λ1和λ2,使用了一些线性代数方法来计算特征值,但注意,cv::cornerHarris使用的权值窗口为均值窗口,如果需要高斯窗口可能得自己实现Harris算法,接口如下:
1
2
3
4
5
6
7
8void cornerHarris (
InputArray src, // 输入图像 (单通道,仅CV_8UC1或者CV_64FC1)
OutputArray dst, // 输出R响应值CV_32FC1
int blockSize, // 窗口
int ksize, // Sobel算子,奇数
double k, // 矩阵迹倍数k,经验参数取值范围 0.04 ~ 0.06
int borderType = BORDER_DEFAULT // 边界模式
)
示例: 1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
using namespace std;
using namespace cv;
int main(){
//图片插值
Mat rawPic = imread("D:/Documents/Desktop/calib1.png",0);
// cv::imshow("rawPic",rawPic);
cv::Mat rRes;
cv::cornerHarris(rawPic, rRes, 3, 3, 0.04); //滑动窗口大小为3,sobel算子ksize = 3, 系数k=0.04
cv::normalize(rRes, rRes, 0, 255, cv::NORM_MINMAX, CV_32FC1); //CV_32FC1归一化到0-255像素
cv::Mat rResC8;
convertScaleAbs(rRes,rResC8); //转换到八通道数据,以绘制趋势图
cv::namedWindow("R_Response",cv::WINDOW_NORMAL);
cv::imshow("R_Response",rResC8);
cv::cvtColor(rawPic,rawPic, cv::COLOR_GRAY2BGR);
for(int i=0; i<rawPic.rows; i++){
for(int j=0; j<rawPic.cols; j++){
if(rRes.at<float>(i,j) > 254) //R相应超过阈值,认为可信角点
rawPic.at<Vec3b>(i,j) = Vec3b(0,0,255); //标红
}
}
cv::namedWindow("Harris",cv::WINDOW_NORMAL);
cv::imshow("Harris",rawPic);
cv::imwrite("D:/Documents/Desktop/Harris.png",rawPic);
cout<<"Done"<<endl;
waitKey(0);
return 0;
}
可见角点被标红: 
Shi-Tomasi角点检测
基本原理
Shi-Tomasi角点检测于1994年由Jianbo Shi和Carlo
Tomasi提出,其基于Harris算法改进而来,仍然基于窗口滑动查找变化率较大的位置,以判断角点是否出现,因此仍然是基于上述的M矩阵判断,但Shi-Tomasi的效果往往优于Harris,其根据变化率阈值来进行角点判断(最小特征值判断),而无需指定k系数,效果比较稳定,其R响应为:
只有当R大于一定阈值
OpenCV实现
1 | void goodFeaturesToTrack(cv::InputArray image, //输入灰度图C8U1 |
示例代码: 1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
using namespace std;
using namespace cv;
int main(){
Mat rawPic = imread("D:/Documents/Desktop/calib1.png",0);
std::vector<cv::Point2f> cornersVp;
cv::goodFeaturesToTrack(rawPic, cornersVp, 20, 0.03, 100, cv::Mat(), 3, false, 0); //检测数量20、质量0.03,最小距离100,滑动窗口为大小3
cv::Mat drawPic;
cv::cvtColor(rawPic, drawPic, cv::COLOR_GRAY2BGR);
for(const auto& pos : cornersVp){
drawPic.at<Vec3b>(pos.y, pos.x) = Vec3b(0,0,255); //标红
}
cv::namedWindow("Shi-Tomasi",cv::WINDOW_NORMAL);
cv::imshow("Shi-Tomasi",drawPic);
cv::imwrite("D:/Documents/Desktop/Shi-Tomasi.png",drawPic);
cout<<"Done"<<endl;
waitKey(0);
return 0;
}
检测顺序与亚像素级检测
对于比较规范的网格图结果,每个角点的响应都是基本一致的情况下,可见角点检测的顺序总是从右下往左上方向检测,即从图像的下到上、从右到左,这点与cv::findContours的寻找逻辑是一样的,体现了OpenCV大量代码采用了这种行优先遍历顺序。
Shi-Tomasi算法的输出是一个cv::Point2f的结果,但并不意味着其是亚像素级别的检测,从打印结果可知所有的检测坐标都是整数,因此其只是为了向后兼容亚像素的精细化,Shi-Tomasi和Harris后如果需要亚像素级精度,可以使用cv::cornerSubPix,这个函数在标定中见过,现在我们来详细叙述其基本原理。
对于Shi-Tomasi算法,因为已经有cv::Point2f数组,直接使用即可:
1
2
3
4
5
6
7
8cv::goodFeaturesToTrack(rawPic, cornersVp, 20, 0.03, 100, cv::Mat(), 3, false, 0);
cv::cornerSubPix(gray, //输入灰度图
corners, //输入整数像素坐标、输出亚像素浮点坐标
cv::Size(5,5), //优化窗口大小,奇数
cv::Size(-1,-1), //死区大小,以优化窗口中心为中心的大小,该死区像素不参与优化
//精度和次数迭代 模型,达40次迭代或达0.01精度才退出迭代
cv::TermCriteria(cv::TermCriteria::EPS + cv::TermCriteria::MAX_ITER, 40, 0.01)
);
对于Harris算法,需要自己构造一下角点数组再精细化:
1
2
3
4
5
6
7
8
9
10
11cv::Mat rRes;
cv::cornerHarris(rawPic, rRes, 3, 3, 0.04); //滑动窗口大小为3,sobel算子ksize = 3, 系数k=0.04
cv::normalize(rRes, rRes, 0, 255, cv::NORM_MINMAX, CV_32FC1); //CV_32FC1归一化到0-255像素
std::vector<cv::Point2f> vp;
for(int i=0; i<rRes.rows; i++){
for(int j=0; j<rRes.cols; j++){
if(rRes.at<float>(i,j) > 254)
vp.push_back(cv::Point2f(j,i));
}
}
cv::cornerSubPix(rawPic, vp, cv::Size(5,5), cv::Size(-1,-1), cv::TermCriteria(cv::TermCriteria::EPS + cv::TermCriteria::MAX_ITER, 40, 0.01));
亚像素角点检测数学原理
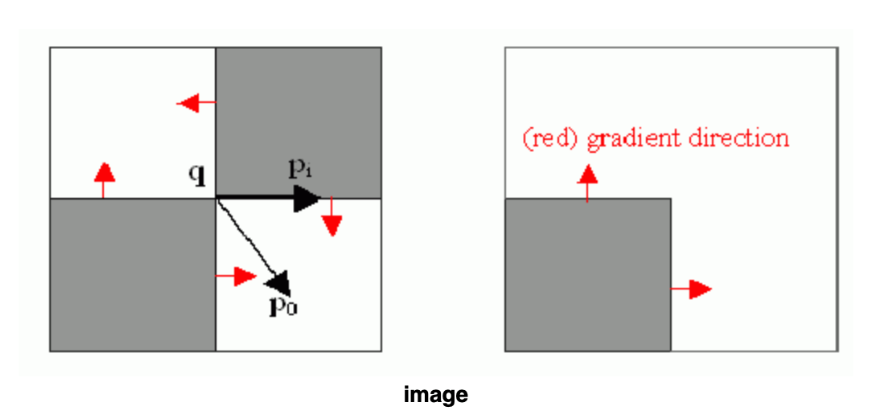
亚像素角点检测的基本原理是:从亚像素点q到q领域内任一点
其中
需要明晰的是该原理的两个细节,也是算法的目标所在:
- 假设q为角点的亚像素点,意味其领域点
存在两种可能,其一是其存在于内边缘像素的内部或者存在于外边缘像素的内部(图中的 ),对于该两种情况, 处的梯度都是0,条件成立;其二是其存在于边缘上(图中的 ),此时图像梯度垂直于边缘,而 为边缘的一个切线,二者正交,内积为0,条件成立;
 2.
在实际计算中,亚像素点是多个
2.
在实际计算中,亚像素点是多个
最小二乘法求极值
最小二乘法的目的是求解约束条件最小模长,其中自变量为q的坐标:
令
为了求f(q)的极值,对其求导并令其为0,根据对称矩阵求导法则,若A为对称矩阵,有:
故:
移项得到:
其中:
这是一个点的情况,当若干个p对q联合约束,而且不同的p距离权重也不同,左右求和得到联合约束方程:
对于右式,其每一项都是确定的,可以看成是常数项,而左侧项则为系数矩阵,这是经典的线性方程组形式:
其解:
其中(二阶矩阵M的逆为主对角线交换、副对角线取反、除以原行列式的值):
代码实现
了解基本数学原理,OpenCV源码就不难理解了,这里模仿着实现了一份最小二乘法的亚像素优化,其输出和OpenCV接口一致。OpenCV计算中,梯度计算使用了简单的中心差分(f(i+1)-f(i-1)),所以边值需要额外1个像素填充,在计算时只需要从1位置算起,OpenCV使用了data()+偏移量方式代替行遍历以提高性能,完整代码如下:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
using namespace std;
using namespace cv;
void myCornerSubPix(cv::Mat& srcMat, std::vector<cv::Point2f>& corners, cv::Size winSize, cv::Size zeroArea, cv::TermCriteria criterial){
assert(srcMat.channels() == 1);
assert((srcMat.rows >= winSize.height*2 + 5) && (srcMat.cols >= winSize.width*2 + 5)); //保证中心差分不发生越界
const int win_width = winSize.width * 2 + 1;
const int win_heigth = winSize.height * 2 + 1;
///高斯权重窗口
cv::Mat gaussian(win_heigth, win_width, CV_32FC1);
float* head = (float*)gaussian.data;
for(int i=0; i<win_heigth; i++){
float y = (float)(i - winSize.height)/winSize.height;
float vy = std::exp(-y*y);
for(int j = 0; j<win_width; j++){
float x = (float)(j - winSize.width)/winSize.width;
head[i*win_width + j] = (float)(std::exp(-x*x) * vy);
}
}
//死区窗口
if(zeroArea.width >=0 && zeroArea.height >=0 && zeroArea.height < winSize.height && zeroArea.width < winSize.width){
for(int i=winSize.height - zeroArea.height; i <= winSize. height + zeroArea.height; i++){
for(int j=winSize.width - zeroArea.width; j<=winSize.width + zeroArea.width; j++){
head[i*win_width + j] = 0;
}
}
}
cv::namedWindow("Gaussian", cv::WINDOW_NORMAL);
cv::imshow("Gaussian",gaussian);
cv::Mat subWindows(win_heigth + 2 , win_width + 2, CV_32FC1); //对于中心差分而言,边缘只需要1个像素填充,故扩2
const int iterNum = (criterial.type & cv::TermCriteria::COUNT) ? std::min(100, std::max(criterial.maxCount,1)) : 100;
double epsilon = (criterial.type & cv::TermCriteria::EPS) ? std::max(0. , criterial.epsilon) : 0.;
epsilon *= epsilon; //使用L2范数误差
for(int num = 0; num < corners.size(); num++){
cv::Point2f rawPoint = corners.at(num);
int iter = 0;
double error = 0;
cv::Point2f ci = rawPoint;
do{
//提取ci为中心的矩形区域,注意Size宽度在前、高度在后
cv::getRectSubPix(srcMat, cv::Size(win_width+2, win_heigth+2), ci, subWindows, subWindows.type());
const float* subpix = &subWindows.at<float>(1,1);
int k = 0;
//注意,要计算的坐标从1开始,边值只为中心差分
double sum_wa,sum_wb,sum_wc,bbx,bby;
sum_wa = sum_wb = sum_wc = bbx = bby = 0;
for(int i=0; i<win_heigth; i++, subpix += (win_width+2)){ //常量指针,指向可变
double py = i - winSize.height;
for(int j=0; j<win_width; j++){
double px = j - winSize.width;
float w = head[k];
//中心差分梯度
double gx = subpix[j+1] - subpix[j-1];
double gy = subpix[j+(win_width+2)] - subpix[j-(win_width+2)];
double gxx = gx*gx;
double gxy = gx*gy;
double gyy = gy*gy;
//权重累计梯度
sum_wa += w * gxx;
sum_wb += w * gxy;
sum_wc += w * gyy;
bbx += w*gxx*px + w*gxy*py;
bby += w*gxy*px + w*gyy*py;
k++;
}
}
double det = sum_wa*sum_wc - sum_wb*sum_wb;
if(det <= DBL_EPSILON * DBL_EPSILON) //det远小于double精度,很接近0
break;
double scale = 1/det;
//因为估计量是基于挖出来的图计算的,这里要加上原始中心坐标才是对应原图坐标
cv::Point2f ci2;
ci2.x = (float)(ci.x + scale*(sum_wc*bbx - sum_wb*bby));
ci2.y = (float)(ci.y + scale*(- sum_wb*bbx + sum_wa*bby));
//L2范数误差
error = (ci2.x - ci.x)*(ci2.x-ci.x) + (ci2.y - ci.y)*(ci2.y - ci.y);
ci = ci2; //更新坐标
if( ci.x < 0 || ci.x >= srcMat.cols || ci.y < 0 || ci.y >= srcMat.rows ) //优化的点已经越界
break;
}while(++iter < iterNum && error > epsilon);
//优化点越界,取原值
if(fabs(ci.x - rawPoint.x) > winSize.width || fabs(ci.y - rawPoint.y) > winSize.height)
ci = rawPoint;
corners.at(num) = ci; //返回亚像素结果
}
}
int main(){
Mat rawPic = imread("D:/Documents/Desktop/calib1.png",0);
std::vector<cv::Point2f> corners;
cv::goodFeaturesToTrack(rawPic, corners, 5, 0.01, 100, cv::Mat(), 3, false, 0.04); //优化五个角点坐标
std::vector<cv::Point2f> bak = corners;
cv::cornerSubPix(rawPic, corners, cv::Size(5,5), cv::Size(-1,-1), cv::TermCriteria(cv::TermCriteria::EPS + cv::TermCriteria::MAX_ITER, 40, 0.01));
for(const auto& pos : corners){
cout << "Standard Output: (" << pos.x << "," << pos.y << endl;
}
myCornerSubPix(rawPic, bak, cv::Size(5,5), cv::Size(-1,-1), cv::TermCriteria(cv::TermCriteria::EPS + cv::TermCriteria::MAX_ITER, 40, 0.01));
for(const auto& pos : bak){
cout << "My Output: (" << pos.x << "," << pos.y << endl;
}
cout<<"Done"<<endl;
waitKey(0);
return 0;
}
结果与OpenCV算法是完全一致的: 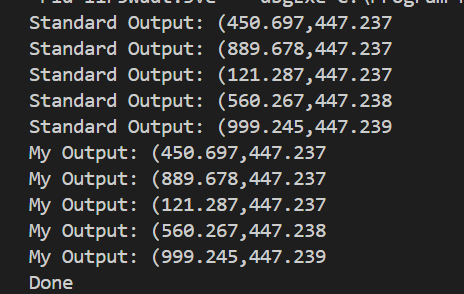
其中用到接口: 1
cv::getRectSubPix(srcMat, cv::Size(win_width+2, win_heigth+2), ci, subWindows, subWindows.type());
参考链接: